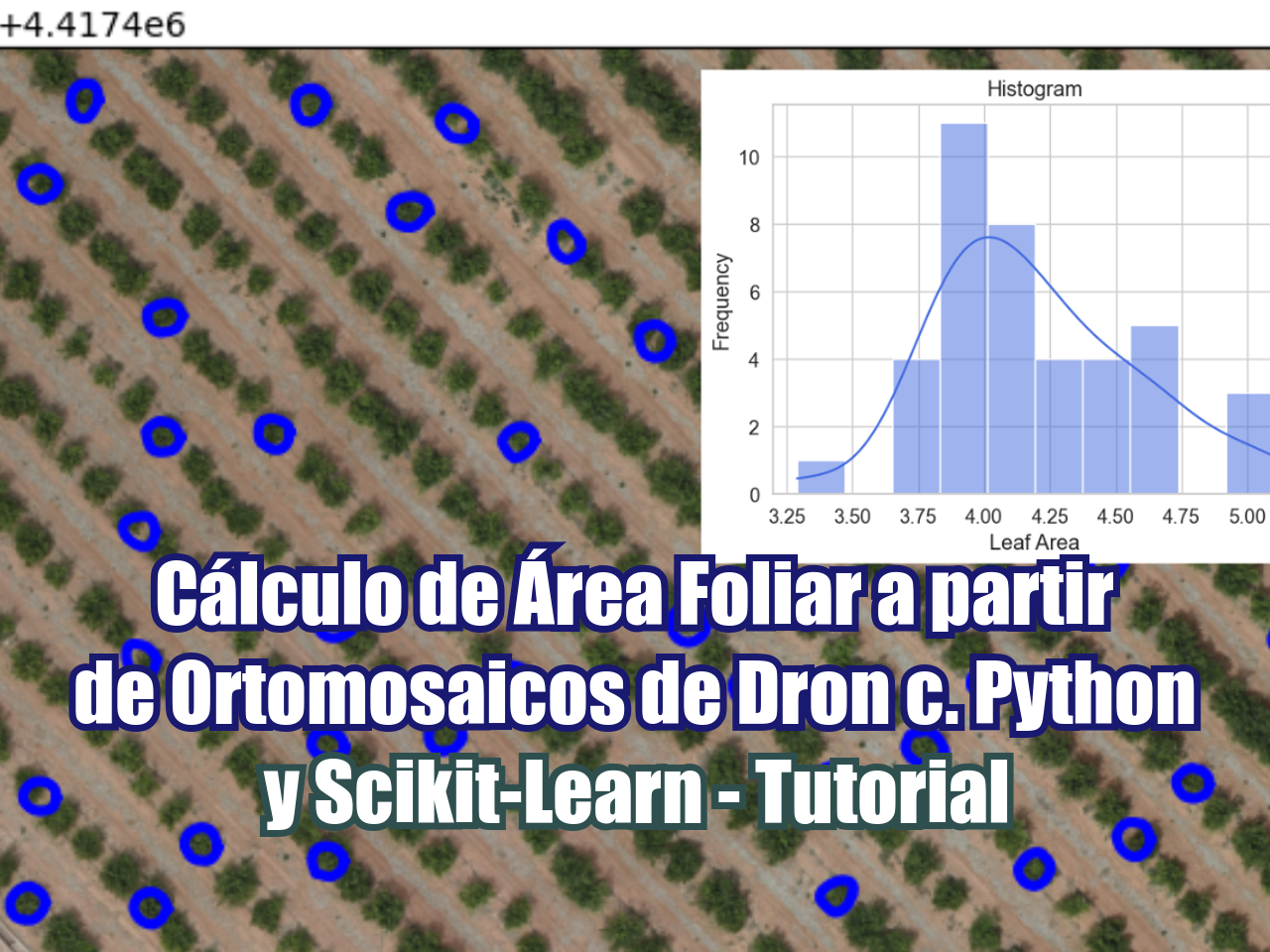
Las imágenes de drones nos muestran características en la superficie con alta precisión y las herramientas de inteligencia artificial nos permiten comprender y obtener información de esas imágenes. Presentamos un tutorial en Python junto con Scikit Learn y bibliotecas geoespaciales que delimita las filas de cultivos en un campo de maíz y proporciona resultados como un archivo espacial vectorial.
El tutorial se puede realizar con Anaconda con todas las bibliotecas necesarias instaladas o con la imagen de Hakuchik en Docker. Para ejecutar Hakuchik se necesita Docker instalado y luego ejecutar esta línea en Bash / Powershell:
docker run -it --name hakuchik -p 8888:8888 -p 6543:5432 hatarilabs/hakuchik:a2d1cb82a605
Este es el repositorio de Github para el tutorial:
https://github.com/SaulMontoya/howToDetectCropRowswithPythonScikitImage
Tutorial
Código
Import required packages
#python and matplotlib libraries
import numpy as np
import math
import matplotlib.pyplot as plt
from matplotlib import cm, gridspec
#geospatial libraries
import rasterio
import fiona
import geopandas as gpd
#machine learning libraries
#!pip install scikit-image
from skimage import feature
from skimage.transform import hough_line, hough_line_peaksImport raster and read band
imgRaster = rasterio.open('../Rst/CREC_Corn_P4P_Clip2.tif')
im = imgRaster.read(1)
fig = plt.figure(figsize=(12,8))
plt.imshow(im)
plt.show()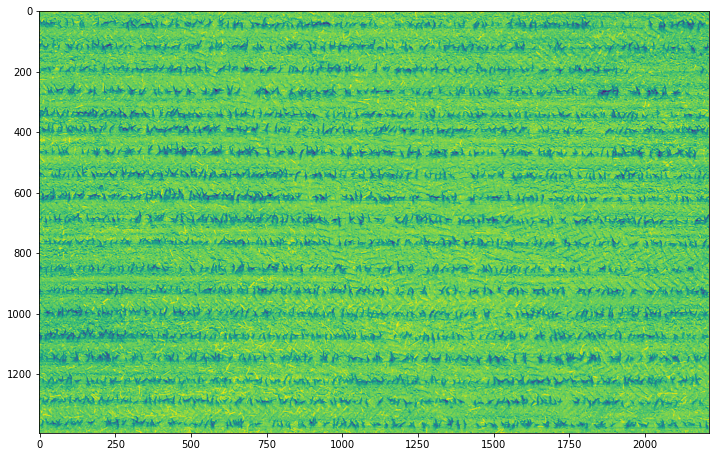
Canny filter
# Compute the Canny filter for two values of sigma
edges1 = feature.canny(im)
edges2 = feature.canny(im, sigma=3)
# display results
fig, (ax1, ax2, ax3) = plt.subplots(nrows=1, ncols=3, figsize=(18, 6),
sharex=True, sharey=True)
ax1.imshow(im, cmap=plt.cm.gray)
ax1.axis('off')
ax1.set_title('noisy image', fontsize=20)
ax2.imshow(edges1, cmap=plt.cm.gray)
ax2.axis('off')
ax2.set_title(r'Canny filter, $\sigma=1$', fontsize=20)
ax3.imshow(edges2, cmap=plt.cm.gray)
ax3.axis('off')
ax3.set_title(r'Canny filter, $\sigma=3$', fontsize=20)
fig.tight_layout()
plt.show()
Hough line transform
selImage = edges2
# Classic straight-line Hough transform
# Set a precision of 2 degree.
precision = 2
tested_angles = np.linspace(-np.pi / 2, np.pi / 2, int(180 / precision), endpoint=False)
h, theta, d = hough_line(selImage, theta=tested_angles)
# Generating figure 1
fig = plt.figure(figsize=(18, 16))
gs = gridspec.GridSpec(2,2)
ax0 = plt.subplot(gs[0,0])
ax0.imshow(selImage, cmap=cm.YlGnBu)
ax0.set_title('Input image')
ax0.set_axis_off()
ax1 = plt.subplot(gs[:,1])
angle_step = 0.5 * np.diff(theta).mean()
d_step = 0.5 * np.diff(d).mean()
bounds = [np.rad2deg(theta[0] - angle_step),
np.rad2deg(theta[-1] + angle_step),
d[-1] + d_step, d[0] - d_step]
ax1.imshow(np.log(1 + h), extent=bounds, cmap=cm.YlGn, aspect=1 / 1.5)
ax1.set_title('Hough transform')
ax1.set_xlabel('Angles (degrees)')
ax1.set_ylabel('Distance (pixels)')
ax1.axis('image')
ax1.set_aspect(.2)
ax2 = plt.subplot(gs[1,0])
ax2.imshow(selImage, cmap=cm.YlGn)
ax2.set_ylim((selImage.shape[0], 0))
ax2.set_xlim((0,selImage.shape[1]))
ax2.set_axis_off()
ax2.set_title('Detected lines')
for _, angle, dist in zip(*hough_line_peaks(h, theta, d)):
(x0, y0) = dist * np.array([np.cos(angle), np.sin(angle)])
ax2.axline((x0, y0), slope=np.tan(angle + np.pi/2))
plt.tight_layout()
plt.show()
Transform results to geospatial information
#define representative length of interpreted lines in pixels
#selDiag = int(np.sqrt(selImage.shape[0]**2+selImage.shape[1]**2))
selDiag = selImage.shape[1]
progRange = range(selDiag)totalLines = []
angleList = []
for _, angle, dist in zip(*hough_line_peaks(h, theta, d)):
(x0, y0) = dist * np.array([np.cos(angle), np.sin(angle)])
if angle in [np.pi/2, -np.pi/2]:
cols = [prog for prog in progRange]
rows = [y0 for prog in progRange]
elif angle == 0:
cols = [x0 for prog in progRange]
rows = [prog for prog in progRange]
else:
c0 = y0 + x0 / np.tan(angle)
cols = [prog for prog in progRange]
rows = [col*np.tan(angle + np.pi/2) + c0 for col in cols]
partialLine = []
for col, row in zip(cols, rows):
partialLine.append(imgRaster.xy(row,col))
totalLines.append(partialLine)
if math.degrees(angle+np.pi/2) > 90:
angleList.append(180 - math.degrees(angle+np.pi/2))
else:
angleList.append(math.degrees(angle+np.pi/2))
#show on sample of the points and lines
print(totalLines[0][:5])
print(angleList)[(490717.0137014835, 5262376.552876524), (490717.02391147637, 5262376.552876524), (490717.03412146925, 5262376.552876524), (490717.0443314621, 5262376.552876524), (490717.054541455, 5262376.552876524)]
[0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 2.0, 28.0, 15.999999999999996, 2.0, 4.000000000000005, 2.0000000000000027, 29.999999999999993, 30.0]Save the resulting lines to shapefile
#define schema
schema = {
'properties':{'angle':'float:16'},
'geometry':'LineString'
}
#out shapefile
outShp = fiona.open('../Shp/croprows.shp',mode='w',driver='ESRI Shapefile',schema=schema,crs=imgRaster.crs)
for index, line in enumerate(totalLines):
feature = {
'geometry':{'type':'LineString','coordinates':line},
'properties':{'angle':angleList[index]}
}
outShp.write(feature)
outShp.close()
#out geojson
outJson = fiona.open('../Shp/croprows.geojson',mode='w',driver='GeoJSON',schema=schema,crs=imgRaster.crs)
for index, line in enumerate(totalLines):
feature = {
'geometry':{'type':'LineString','coordinates':line},
'properties':{'angle':angleList[index]}
}
outJson.write(feature)
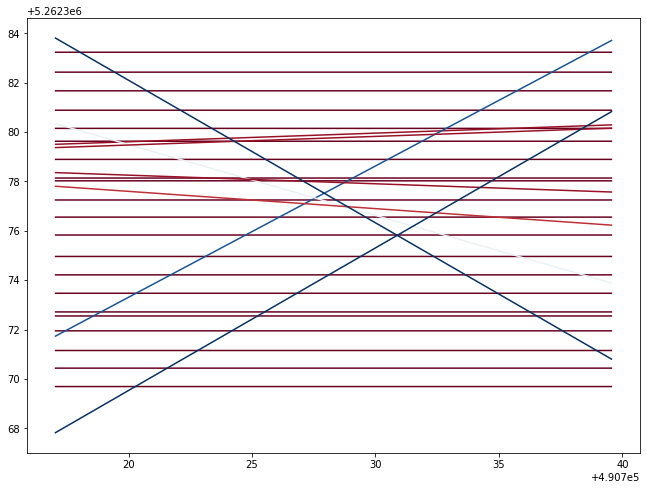
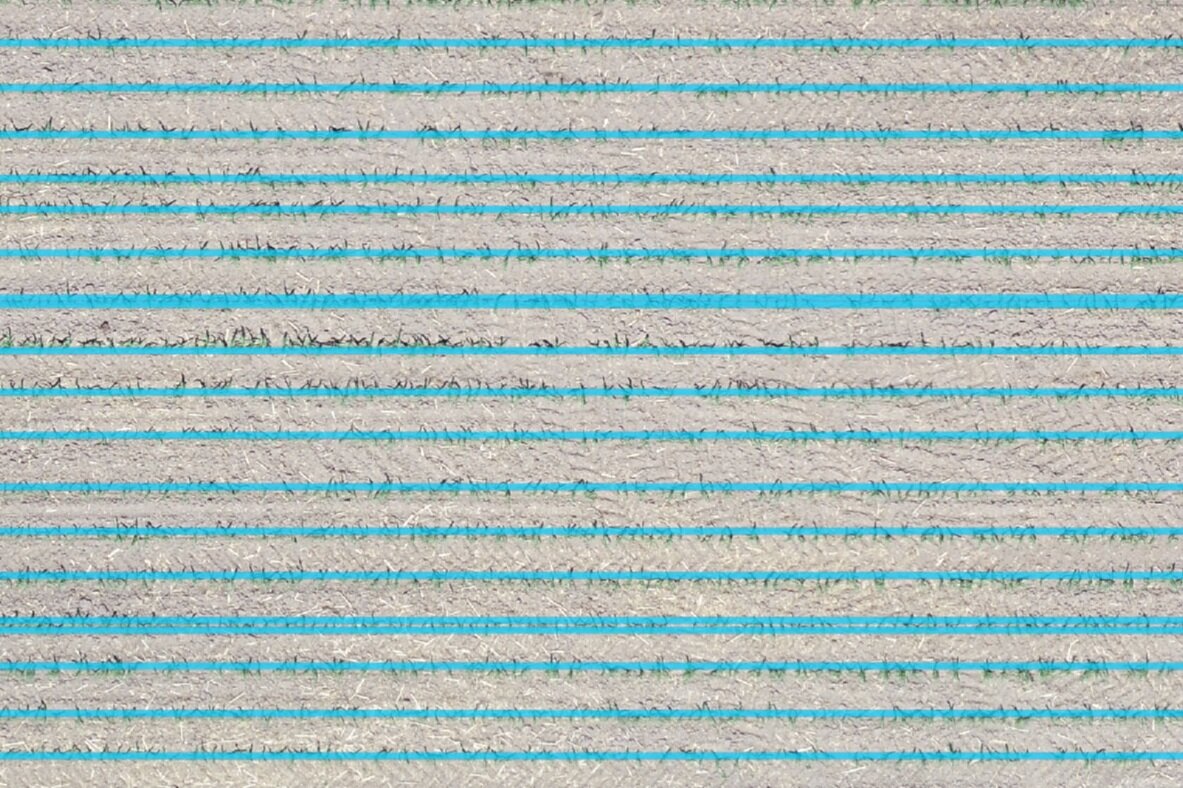
outJson.close()Representation of the interpreted crop rows
df = gpd.read_file('../Shp/croprows.shp')
fig, ax = plt.subplots(figsize=(12,8))
lineShow = df.plot(column='angle', cmap='RdBu', ax=ax)
plt.show()